Bonjour,
Il y à bientôt 2 ans je vous avait parlé de la fabrication de mon meuble informatique.

(C’était ici)
Un NAS pour sauvegarder ses données, c’est bien, mais il est situé dans la même maison que mes PC. Donc, en cas d’incendie, vol, inondation, mega-surtension ou n’importe quel problème physique, les données sont perdues.
Pour palier à cela, fin 2015 j’ai installé un NAS chez mes parents. Avec ses 2 disques dur, il permet la sauvegarde de 2 NAS principaux, le mien et celui du frangin. Ainsi, avec plus de 150 Km de distance, je suis certain de toujours conserver mes données, quoiqu’il arrive à mon matériel.
Comme vous pouvez vous en douter, j’ai fait une installation au Top :

L’idée est simple : reprendre le principe du meuble informatique, une boite avec une ventilation filtrée, dont le filtre est très très accessible pour que personne n’hésite a mettre un petit coup d’aspirateur au passage. Les filtres cachés ou inaccessible n’étant que bien trop rarement nettoyés.
En plus, je veux que l’aire frais arrive devant le NAS, et sorte par derrière. Ainsi, il bénéficiera d’une ventilation naturelle, en plus de son ventilateur qu’il gère comme bon lui semble.
C’est partis avec notre nouveau Joujou !

Oui, vous allez pas mal la voir celle-là 🙂
Bah voila, en peu de temps, un tas de planches aux bonnes dimensions et d’équerre.

Quelques essais pour faire les rainures à la scie :
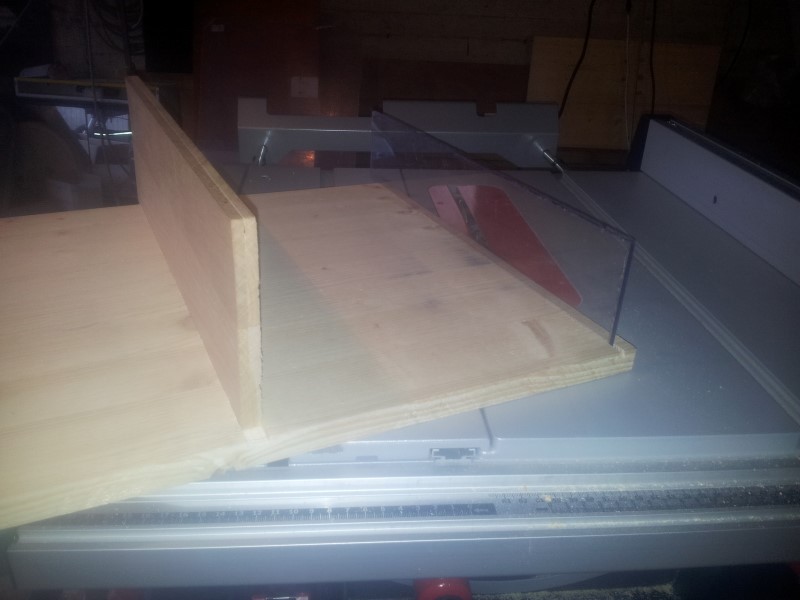
Une grosse pour la tablette, une plus fine pour le plexi de façade
La même chose sur les vrais. La disposition des planches me permet de ne pas avoir à faire de rainure arrêté, ni qu’elles se voient au montage finale.


On commence à apercevoir les proportions …


Un autre frangin s’est offert de nouveaux jouets, il est venu faire mumuse à la maison 🙂

Pas mal du tout la lamelleuse Makita, en très peu de temps on obtient facilement un assemblage dont les affleurements sont parfait.

Un autre jouet tout neuf. A priori y avait pas la taille au dessus. Parfait pour la muscu !

Je plaisante, mais même si elle est lourde à sortir du coffret, en réalité elle est très douce à l’usage. Je lui avait demandé de l’apporter pour tester une option dont je ne dispose pas sur les miennes : le guide parallèle.
Ayant des rainures parallèles à faire sur 2 planches, c’est bien plus simple avec ce guide qui ne se dérègle pas d’une planche sur l’autre.


Comme on pouvait s’en douter avec des planches d’équerres et une bonne machine, les rainures sont à la bonne place et la tablette trouve naturellement sa place.

Mise en place du ventilo pour vérifier que je ne me suis pas loupé sur les mesures.

Ouf, c’est bon.
J’en profite pour tracer l’emplacement de l’entrée d’aire.

Désolé Didier, Christophe avait un véritable besoin de cette nouvelle défonceuse, ce qui n’est pas mon cas, je retourne donc avec ma black & Decker 😉
En réalité, je doit bien avouer que je l’aime bien ma petite défonceuse. En plus, je lui ai fait des compas, dont un qui permet de faire de tout petits cercles. C’est donc ce compas que je vais prendre pour me préparer un gabarits que j’utiliserais avec une bague de copiage.

Un peu de double face, un centrage sur le trou dessiné avant …

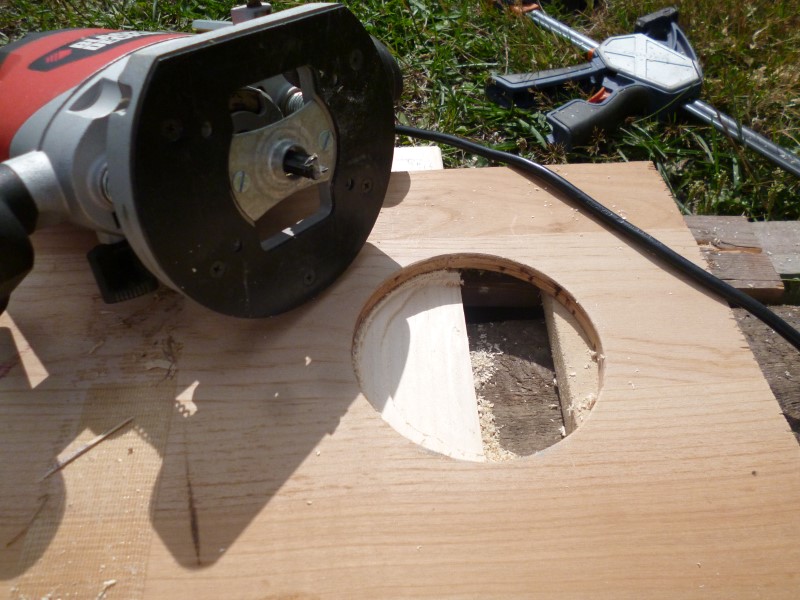
J’enlève une partie du bois avec une scie cloche toute pourrie qui trainait sur mes étagères.

Et c’est parti pour faire un jolie petit trou.

Il est pas au top mon nouveau photographe ? Même plus besoin de me cacher !
Bon, à priori je n’ai rien oublié… collage !

J’utilise mon gabarits pour préparer un demi cercle.
Que je retaille ensuite, de plus en plus petit …


Puis que je colle.

Voila, le ventilateur sera maintenu ainsi en place, et si je doit le changer, je n’ai qu’un tourillon à enlever.


Mise en place des charnières…

J’ai beaucoup aimé le guide parallèle, mais ici ce n’aurait pas été possible, retour donc à la butée tenue au scotche double face.


Impec, j’en profite pour vous présenter le trou permettant la sortie de l’aire et le passage des câbles.

On se rapproche de la fin… vernis !

Pour alimenter le ventilateur, un transfo 12V à 3 €…

… ainsi que de petites soudures et gaine thermo.

Le verni est sec, mise en place finale.

Ajout d’un peu de quincaillerie pour tenir le couvercle ouvert, et fermé.

Ainsi que du filtre anti poussière.

A noter que même s’il est démontable sur mon meuble informatique je ne l’ai jamais déposé. il se nettoie très bien à la main ou avec un petit coup d’aspirateur directement en place.
Ici, je l’ai donc simplement vissé en place.
Ha, bah voila, c’est fini 🙂

J’ai bien le passage d’aire que je souhaitait, pour venir devant les NAS.


Ha, oui, il a pris la poussière…
On retrouve même une partie des lettres sur le disque dur.

Un bon coup de soufflette, et c’est oublié.
Mise en place de l’onduleur et de mon NAS.
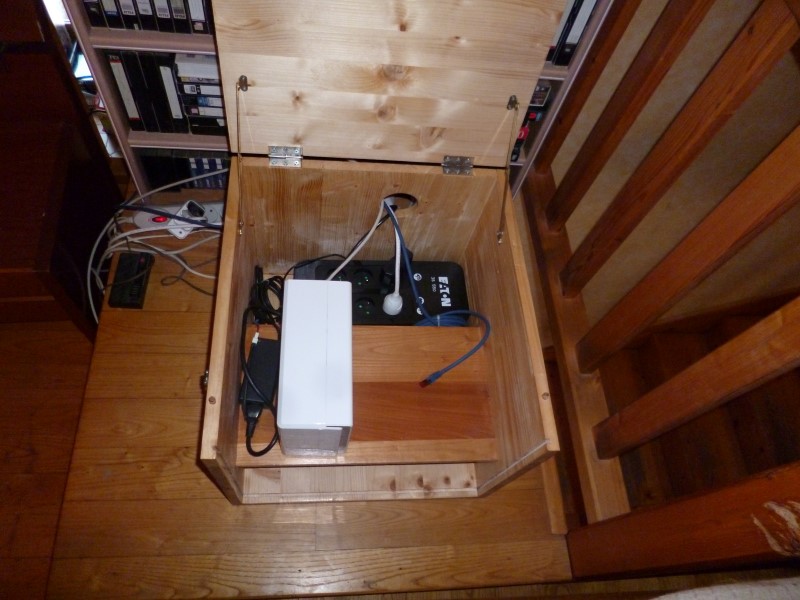
(Je précise mon Nas, parce que celui de mes parents devrait bientôt le rejoindre)

Voilà, plus qu’à passer un petit coup d’aspirateur de temps à autre, et le matériel devrait rester propre et frais un moment …

Vous trouvez pas qu’il a l’aire seul et triste ?

Bon dimanche,
Jilks